こんにちは。
今回は「すばる望遠鏡の主鏡制御用音叉振動式力センサ」の解説です。
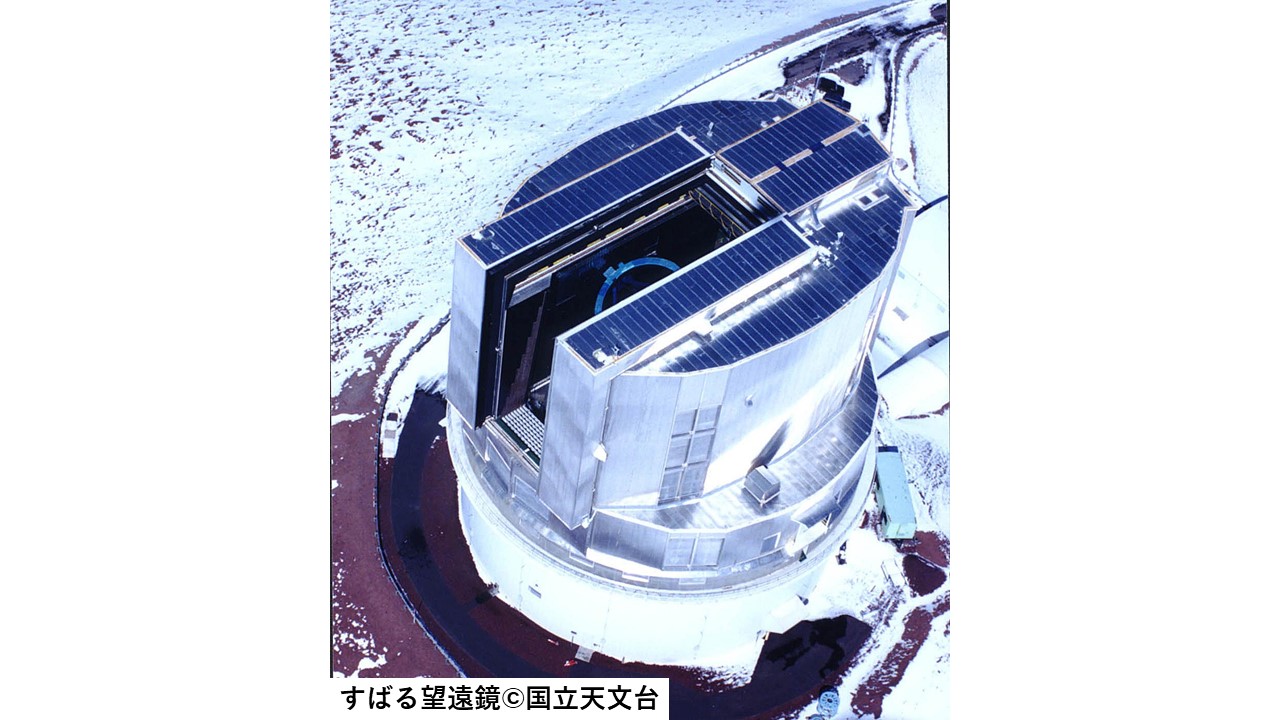
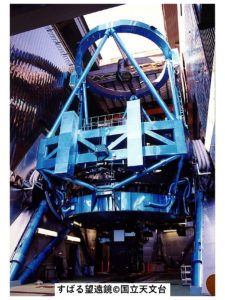
国立天文台のハワイマウナケア山頂にある「すばる望遠鏡」は、ファーストライトから20年以上たちましたが、今でも次々と新しい成果を上げ活躍しています。「すばる望遠鏡」の詳細はホームページやDVD、NHKプロジェクトX、書籍、雑誌を参照してください(文末参照)。また、すばる望遠鏡について筆者より詳しい専門家やマニアの方も沢山いらっしゃると思いますが、今回は8.2mの主鏡制御用「音叉振動式力センサ」の紹介です。
 「すばる望遠鏡」の建設計画は具体化する前にも長い歴史があるようですが、民間のメーカが参加し具体的な技術検討が始まったのが1984年頃のようです。力センサの開発で筆者が参加したのは1986年になります。1991年に国家予算が付き正式に全体の建設がスタート、1999年にファーストライトが行われました。筆者が参加したころのプロジェクト名は「JNLT (Japan National Large Telescope)」と呼ばれ、1991年公募によって「すばる」の名称が付きました。
「すばる望遠鏡」の建設計画は具体化する前にも長い歴史があるようですが、民間のメーカが参加し具体的な技術検討が始まったのが1984年頃のようです。力センサの開発で筆者が参加したのは1986年になります。1991年に国家予算が付き正式に全体の建設がスタート、1999年にファーストライトが行われました。筆者が参加したころのプロジェクト名は「JNLT (Japan National Large Telescope)」と呼ばれ、1991年公募によって「すばる」の名称が付きました。
音叉振動式力センサに限れば、この時(1991年)までに何回かの試作を繰り返し、最初の要求仕様0.01N/600N(60kg)の力センサは設計が出来ていたのですが、全体計画がスタートした時点で力センサに対する要求仕様が0.01N/1500N(150kg)に跳ね上がったため、1991年から開発をやり直して、1994年に終了しました。力センサの要求仕様が600Nから1500Nに変更された理由は、当初主鏡は7.5mの計画でしたが、同時期に欧州や米国が計画していた望遠鏡が8mクラスで、世界一を目指すため8.2mに変更され、力センサの仕様も1500Nになったためです。
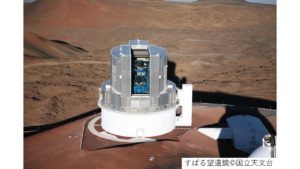
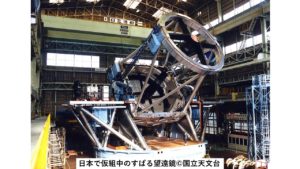 1996年1月に国内で仮組された主鏡を除く望遠鏡本体が、建設に参加した各社にお披露目され、筆者も見学させてもらいました。この時は望遠鏡本体のみでしたが、2000年に稼働し始めたハワイ島マウナケア山頂の天文台全容を見学した時には、望遠鏡本体のみならずドームを初め、観測装置や設備の素晴らしさに、計画に参加した技術者として感慨深いものがありました。仮組に利用された大阪南港の跡地には現在USJ(ユニバーサル・スタジオ・ジャパン)が出来ています。建設されてから20年以上たつわけですから当然ですが、望遠鏡の周辺機器や観測装置、コンピュータは技術の進歩とともにバージョンアップを繰り返しているようです。新しい観測が必要になる限り「すばる望遠鏡」は進化し続け、ある意味「完成した」とは呼ばれないのかもしれません。
1996年1月に国内で仮組された主鏡を除く望遠鏡本体が、建設に参加した各社にお披露目され、筆者も見学させてもらいました。この時は望遠鏡本体のみでしたが、2000年に稼働し始めたハワイ島マウナケア山頂の天文台全容を見学した時には、望遠鏡本体のみならずドームを初め、観測装置や設備の素晴らしさに、計画に参加した技術者として感慨深いものがありました。仮組に利用された大阪南港の跡地には現在USJ(ユニバーサル・スタジオ・ジャパン)が出来ています。建設されてから20年以上たつわけですから当然ですが、望遠鏡の周辺機器や観測装置、コンピュータは技術の進歩とともにバージョンアップを繰り返しているようです。新しい観測が必要になる限り「すばる望遠鏡」は進化し続け、ある意味「完成した」とは呼ばれないのかもしれません。
そんな中で、主鏡制御用の音叉振動式力センサは25年以上経過しても、性能を維持しトラブルもなく、最新の観測にも何ら問題がないようでそのまま使い続けられています。力センサ用の制御基板はようやくメンテされ、新しい基板に置き換わりましたが今でも使い続けられるでしょう。また、製作に8年の時間が必要な一枚鏡の主鏡を初め、望遠鏡本体部は容易にバージョンアップは難しいのでしょう。
 すばる望遠鏡は大変複雑で高度な当時の最先端技術を多数導入して開発されています。しかし、よく見ると高度な最先端技術ではありますが、目的(天体観測)のために望遠鏡本体はシンプルで原理原則に則った、時間が経過しても色あせない基本技術で出来ていると思います。元々天体望遠鏡は50年、100年と使い続けるため、いたってシンプルな構造をしているからかもしれません。8.2mの一枚鏡も、500トンの望遠鏡本体が片手で動く(回転)静圧軸受も、能動支持機構も、独特な形状のドームにしても、それぞれは高度で複雑な技術で出来上がっているのですが、究極を追求した結果は原理原則に則った、実にシンプルに出来ていると筆者は感心しています。
すばる望遠鏡は大変複雑で高度な当時の最先端技術を多数導入して開発されています。しかし、よく見ると高度な最先端技術ではありますが、目的(天体観測)のために望遠鏡本体はシンプルで原理原則に則った、時間が経過しても色あせない基本技術で出来ていると思います。元々天体望遠鏡は50年、100年と使い続けるため、いたってシンプルな構造をしているからかもしれません。8.2mの一枚鏡も、500トンの望遠鏡本体が片手で動く(回転)静圧軸受も、能動支持機構も、独特な形状のドームにしても、それぞれは高度で複雑な技術で出来上がっているのですが、究極を追求した結果は原理原則に則った、実にシンプルに出来ていると筆者は感心しています。
音叉振動式力センサの役割
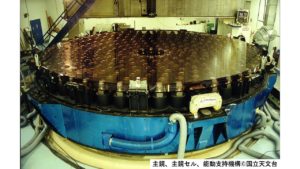 一枚鏡の主反射鏡は外形Φ8.3m(有効口径Φ8.2m)、厚さ20cm、重さ22.8トンあります。しかも裏面にΦ15cm、深さ15cmの穴が261個もあいていて、これでは薄い紙と同じで自重で変形、破損してしまいます。そこでこの穴に261本の能動支持機構を取り付け、鏡が理想的な形状になるように制御しています(3点の固定点を含めて264点で保持)。この時、形状制御する力を0.01N(1g)単位で計測する必要があり、音叉振動式力センサが使われています。
一枚鏡の主反射鏡は外形Φ8.3m(有効口径Φ8.2m)、厚さ20cm、重さ22.8トンあります。しかも裏面にΦ15cm、深さ15cmの穴が261個もあいていて、これでは薄い紙と同じで自重で変形、破損してしまいます。そこでこの穴に261本の能動支持機構を取り付け、鏡が理想的な形状になるように制御しています(3点の固定点を含めて264点で保持)。この時、形状制御する力を0.01N(1g)単位で計測する必要があり、音叉振動式力センサが使われています。
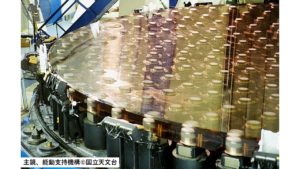 望遠鏡が天頂(真上)を向いたとき、鏡の自重(22.8トン)を能動支持機構が支えます。この時1本当たり約90kgを支えています。つまり最大90kgの負荷を支えながら1gの計測、制御を常時行っていることになります。しかも4200mの頂上は季節変動や昼夜の寒暖差も大きく、気圧は0.6気圧です。日本での製造条件と実際の運用条件に大きな差があるため、製造過程で実運用条件の試験を繰り返し行い調整、動作検証をしています。
望遠鏡が天頂(真上)を向いたとき、鏡の自重(22.8トン)を能動支持機構が支えます。この時1本当たり約90kgを支えています。つまり最大90kgの負荷を支えながら1gの計測、制御を常時行っていることになります。しかも4200mの頂上は季節変動や昼夜の寒暖差も大きく、気圧は0.6気圧です。日本での製造条件と実際の運用条件に大きな差があるため、製造過程で実運用条件の試験を繰り返し行い調整、動作検証をしています。
力センサに要求される性能は分解能や繰返し性だけではありません。重要なのはドリフトやヒステリシス、クリープも経年変化も無いかまたは要求精度に対して十分小さく、再現性が良いことです。経年変化のゼロやスパンはある程度補正できますが、それ以外の特性が変化すると補正が出来ません。重要なのは、どんな環境でも繰返し性や再現性が良く、変わらないことです。
力センサの種類はひずみケージ式をはじめ数多くの原理、センサがあります。実際初期の開発段階では各種の力センサの検討や評価が行われました。しかし、最終的に要求性能をクリアできたのは音叉振動式の力センサだけでした。
 望遠鏡は天頂から水平(線)まで動きます。角度変化による主鏡の自重による変形は、能動支持機構のてことおもりで機械的にバランスが取られ抑えられています。単純ですが優れた方式と言えるでしょう。能動支持機構はアクチュエータとも呼ばれ、バネとモータで力を発生する機構、力を伝達する機構、てことおもりのてこ機構、音叉振動式力センサ、自在支点機構等で構成され主鏡セルと呼ばれる主鏡を支える望遠鏡本体に固定されています。力伝達機構がソケット、スリーブを介して主鏡のΦ15cmの穴に挿入されています。主鏡は能動支持機構の上に単に乗っているとも言えます。
望遠鏡は天頂から水平(線)まで動きます。角度変化による主鏡の自重による変形は、能動支持機構のてことおもりで機械的にバランスが取られ抑えられています。単純ですが優れた方式と言えるでしょう。能動支持機構はアクチュエータとも呼ばれ、バネとモータで力を発生する機構、力を伝達する機構、てことおもりのてこ機構、音叉振動式力センサ、自在支点機構等で構成され主鏡セルと呼ばれる主鏡を支える望遠鏡本体に固定されています。力伝達機構がソケット、スリーブを介して主鏡のΦ15cmの穴に挿入されています。主鏡は能動支持機構の上に単に乗っているとも言えます。
音叉振動式力センサと能動支持機構
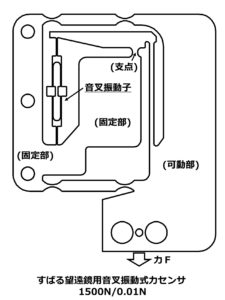
音叉振動式力センサは能動支持機構のソケット部に固定され、力発生機構から弾性支点機構、並行リンク機構を介して、特殊加工したフレクシャで連結され、常に主鏡の自重を支えながら発生した力を計測しています。力センサだけでなく能動支持機構の各部は、0.01N(1g)/1500N(150kg)の性能を維持する機構になっていなければなりません。機構部も試作と評価実験を繰り返して最終形状に固まりました。弾性支点は十字板バネがモジュール化されているフレキシブルな機構であり、並行リンク機構も強度と性能を兼ね備えた構造になっています。十字板バネと並行リンク機構の実にシンブルな構造と言えるでしょう。
振動式力センサの一般的な問題として「共振」の影響が性能劣化を引き起こします。振動子から漏洩する振動エネルギーが結合部を経由して、振動子の一部と力伝達機構等の間で共振現象を起こし、性能を劣化させます。共振を回避するためには、振動子の最適設計や力伝達機構の最適設計を行い、振動エネルギーの漏洩を最少にします。機構部は振動子の固有振動数及び各次数の振動数を回避する構造になるように設計します。今回の力センサも例外ではなく「共振」による性能劣化が起こりました。音叉振動子だけでなく連結部の構造を見直し、最適化してクリアしています。
主鏡は年一回アルミ薄膜を再蒸着するため簡単ではないが、能動支持機構から取り外しが出来るようになっています。能動支持機構(アクチュエータ)についてはWeb上に説明があると思います、興味がある方は検索してみてください。
主鏡制御用音叉振動式力センサ
 音叉振動式力センサの主な仕様を下記します。(音叉振動子の原理、詳細は別回で解説します)
音叉振動式力センサの主な仕様を下記します。(音叉振動子の原理、詳細は別回で解説します)
・定格荷重 :1500N(150kg)
・分解能 :0.01N(0.001kg)
・総合精度(再現性、温度影響、他):0.1N(0.01kg)/30℃変化
・サンプリング速度:50msec以下
通常の環境では±0.01Nの性能を維持し、30℃の温度範囲の中でも±0.05Nの性能を発揮しています。サンプリング速度が40msecで0.01N/1,500N=1/150,000を実現しています。
音叉振動式力センサは力Fを振動数(周波数)fの変化で計測するセンサです。音叉振動子の固有振動数fと力Fの関係は右式のようになります。
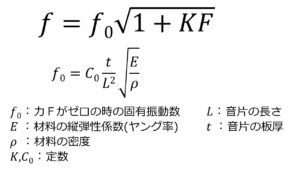 式から解るように周波数fと力Fは線形の特性にはならないのですが、ヒステリシスやクリープがなく再現性も良い素直な特性のため、デジタル演算の多項式で直線近似を行えば4次式で十分な性能が得られます。また、ドリフトや経年変化が少なく安定である理由は式からもわかるように、振動数(周波数)fは音叉振動子の形状(寸法)および音叉材料のヤング率、密度で決まるためです。つまり音叉振動子の形状と材料がきまれば周波数fが決まり、形状や材料特性は変化しないため、ドリフトや経年変化が少ないと言えるのです。これが音叉振動式力センサの最大の特徴で、他の力センサがもつ本質的な不確定(不安定)要素がありません。
式から解るように周波数fと力Fは線形の特性にはならないのですが、ヒステリシスやクリープがなく再現性も良い素直な特性のため、デジタル演算の多項式で直線近似を行えば4次式で十分な性能が得られます。また、ドリフトや経年変化が少なく安定である理由は式からもわかるように、振動数(周波数)fは音叉振動子の形状(寸法)および音叉材料のヤング率、密度で決まるためです。つまり音叉振動子の形状と材料がきまれば周波数fが決まり、形状や材料特性は変化しないため、ドリフトや経年変化が少ないと言えるのです。これが音叉振動式力センサの最大の特徴で、他の力センサがもつ本質的な不確定(不安定)要素がありません。
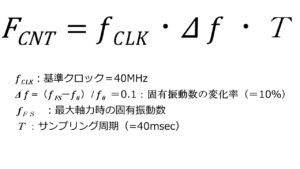 加えられた力Fは音叉振動子の形状で決まる固有振動数f0(=力F0)から力Fsが加えられた時の固有振動数fFSとの差Δfから求めます。
加えられた力Fは音叉振動子の形状で決まる固有振動数f0(=力F0)から力Fsが加えられた時の固有振動数fFSとの差Δfから求めます。
音叉振動子は力F0の時、固有振動数f0は約2000Hz、計測する力FSが加えられた時に周波数fFSが約10%変化するように設計されています。ただし周波数fをそのまま周波数カウンタでカウントしても分解能が得られないため、基準クロックをカウントする方式で分解能を得ています。式に実際の数値を当てはめてると、FCNT=160,000=1500N、分解能は1/160,000≒0.01Nとなります。
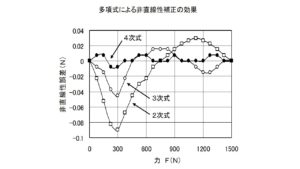
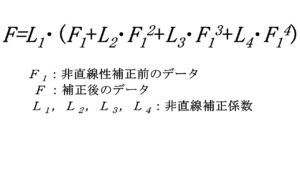 音叉の周波数fは力Fに対して非線形特性のため直線補正するのは多項式で行います。下左のグラフが補正なしの基本の非直線性誤差、下右のグラフが次数の違いによる補正結果です。4次の多項式で補正した場合に1/200,000の直線性が得られることがわかります。
音叉の周波数fは力Fに対して非線形特性のため直線補正するのは多項式で行います。下左のグラフが補正なしの基本の非直線性誤差、下右のグラフが次数の違いによる補正結果です。4次の多項式で補正した場合に1/200,000の直線性が得られることがわかります。
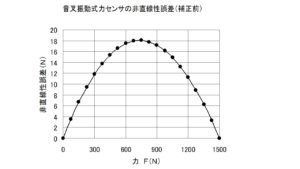
音叉式電子天びん等では4次式でも1/1,000,000以上の直線補正が可能です。それだけ素直な特性を持っていると言えます。音叉振動子自身が直接1500Nを測れるわけではありません。てこ機構とリンク機構を組み合わせて1500N計測できる力センサとしています。詳細は次回以降解説します。
今回はすばる望遠鏡の8.2m主鏡の鏡面制御用「音叉振動式力センサ」の概要を紹介しました。文章の説明ばかりでイメージが湧かない部分が多かったかもしれません。次回以降もう少し詳しく解説したいと思います。
天体望遠鏡は日没から日出まで連続観測を行います。連続で観測することは大変重要で、センサや機器の校正、調整で観測を中断してしまうようなことは避けなければなりません。つまりドリフトが少なく再現性があり、高精度、高安定で校正や調整が不要なセンサが必要です。実際に欧米の同等クラスの望遠鏡は計測する力が少ないにもかかわらず、観測を中断してセンサの校正を行っているようですが、すばる望遠鏡は観測途中にセンサを校正、調整する必要がありません。
力センサに限らず多くのセンサ類は欧米で開発されました。しかし音叉振動式力センサは日本で生まれた日本オリジナルの数少ない力センサです。シンプルな構造でありながら高精度で高安定な力計測が実現できるのはその原理に基づいています。音叉振動子の説明は別回で行いたいと思いますが、シンプルで素直な特性と誤差要因が少ない原理、構造が音叉振動式力センサがすばる望遠鏡に採用され、25年以上問題なく動作し続けている理由のひとつと思います。
開発当初、電子はかり用の構造が違う10kg以下の音叉式センサしか持たなかった時から、現在の最終形になるまで、延べ8年間(実質4年)プロジェクトに関わりましたが、どんな製品であれ既存技術では出来ない、新しい技術開発を行う時には、原理原則の理論的裏付けは勿論のことですが、何事も発生した事象、現象に対して、ひとつひとつに真摯に向き合い、柔軟な発想で事実に基づき検証、解決して行くことが肝要と考えます。
ご意見、ご要望、ご質問をお待ちしております。
参考文献:
DVD: 未知への航海~すばる望遠鏡建設の記録~:国立天文台
NHK:プロジェクトX 挑戦者たち 宇宙ロマン すばる ~140億光年 世界一の望遠鏡~
Web関係:
すばる望遠鏡ホームページ:http://subarutelescope.org/j_index.html
すばる望遠鏡を支える最新技術:http://subarutelescope.org/Introduction/j_tech.html
ビデオ、書籍類一覧:https://subarutelescope.org/jp/library/
すばる望遠鏡~実現のかぎ:主鏡支持システムの開発~:https://www.jstage.jst.go.jp/article/bplus/5/3/5_3_232/_pdf
YouTube:https://youtu.be/kRs8uYgrd4A
すばる望遠鏡誕生:https://www.youtube.com/watch?v=zyecxOUUr-4
サイエンスチャンネル:「匠の息吹を伝える~“絶対”なき技術の伝承~(54)「すばる」を支える高精度な技術~音叉式センサの製造~
https://sciencechannel.jst.go.jp/D000502/detail/D020502054.html
書籍:
「すばる望遠鏡」:家正則著 岩波書店
世界最大の望遠鏡「すばる」:安藤裕康著 平凡社
発表資料:
「大型望遠鏡すばるに採用された高精度音叉式力センサ」 計測自動制御学会 計測部門大会
「音叉振動式力センサの特長とすばる望遠鏡への応用」 センシング技術応用研究会
新光電子株式会社ホームページ:http://www.vibra.jp