こんにちは。
今回は「音叉振動式力センサ」の説明です。ブログの初回及び「すばる望遠鏡の主鏡制御用音叉振動式力センサ」の中で紹介していますが今回から解説して行きます。
「音叉振動式力センサ」は1978年頃日本で原型が生まれ1980頃最初に圧力センサとして実用化されました。筆者が前職ではかり用の音叉振動式力センサの開発をグループで始めたのが1981年、現在の形状の原型となる力センサを使用した音叉式電子はかりが商品化されたのが1983年です。
開発されてから40年以上過ぎていますが、今回から説明する形状の力センサを現在も製品化しているのは1社のみです。独自の技術とも言えますが、筆者は広く汎用で普及していないことが残念でなりません。似たようなセンサも有りますが複雑であったり性能が今一つであったり、シンプルで高性能な力センサはあまり実用化されていません。筆者は良いセンサとは世の中に広く普及し、各分野で各社が切磋琢磨しながら進歩して行くものと考えています。ひずみゲージ式も電磁力平衡式も各社が競って技術開発を行ってきたからこそ現在の技術があり、新しい製品が生まれ続けています。
音叉振動式力センサが汎用になりにくい難しいセンサであることも事実です。精密な加工技術や解析、信号処理の技術が必要ですが、ある意味汎用で使えるほど完成されてない、発展途上のセンサと言えるのかもしれません。筆者は音叉振動式力センサが計量計測関係者だけでなく、誰でもいろいろな分野で活用できることを望んでいます。また、その普及に微力ながら貢献して行きたいと考えています。
大きな括りで考えると音叉振動式も「振動式」センサの分類に入ります。振動式には「弦振動式」、「水晶振動式」、「MEMS」等々があり、それぞれに特徴があります。音叉振動式はシンプルでありながら精度と安定性とを兼ね備えた実用的な力センサと考えています。分解能だけ考えれば水晶式もありますが利用するのが難しく実用的ではありません。弦振動式も単一弦は精度が悪く、複合弦式は複雑な機構で性能もそれほど高くありません。勿論音叉振動式だけが良いのではなくデメリットもあり、計測対象やアプリケーションに向き不向きがあります。それぞれの特徴に合わせた使用方法を考えるとよいでしょう。
音叉振動式力センサの基本
音叉振動式力センサは音楽の調律用U字型音叉を上下に2個付き合わせ、力を加えられる構造をしています。シンプルな構造で圧縮力でも張力でも測定できます。圧縮力が加えられると振動数(周波数)が下がり、張力が加えられると振動数(周波数)が上がります。振動数(周波数)の変化から加えられた「力=F」が解ります。


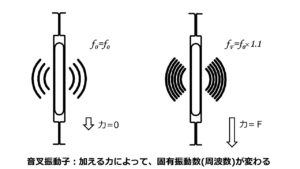
右側の写真は音叉振動子の一例です。
音叉振動子の原理
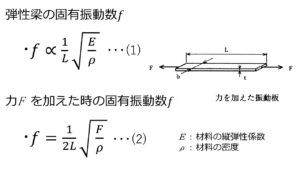 弾性梁の固有振動数fは形状、材質で決まり(1)式の関係があり、力を加えた弾性梁の場合は(2)式になります。音叉振動子(複合音叉振動子DETF:Double Ended Tuning Fork)になると(3)式のように複雑な式になるのですが、簡単にすると(4)式のように考えればよく、振動数は加えた「力」と振動板の厚さ、長さ、幅などの「形状」及び材料の弾性率、密度などの「材質」により決まります。
弾性梁の固有振動数fは形状、材質で決まり(1)式の関係があり、力を加えた弾性梁の場合は(2)式になります。音叉振動子(複合音叉振動子DETF:Double Ended Tuning Fork)になると(3)式のように複雑な式になるのですが、簡単にすると(4)式のように考えればよく、振動数は加えた「力」と振動板の厚さ、長さ、幅などの「形状」及び材料の弾性率、密度などの「材質」により決まります。
 これが音叉振動式力センサが他の力センサに比べて安定性がよく、高精度である所以になります。つまり音叉振動子の形状、材質は変わらないため長期安定性が優れているわけです。すばる望遠鏡に採用されたのも長期安定性と高精度を維持できる唯一の力センサであったからです。
これが音叉振動式力センサが他の力センサに比べて安定性がよく、高精度である所以になります。つまり音叉振動子の形状、材質は変わらないため長期安定性が優れているわけです。すばる望遠鏡に採用されたのも長期安定性と高精度を維持できる唯一の力センサであったからです。
振動梁のみでも軸力を加えれば振動数が変化し力を測定できるのですが、振動することによって発生する支持部の反力やモーメントが影響し、外部に振動エネルギーが漏れたり支持部で消滅するため、メカニカルQを高く維持することが困難になります。従って正確な力測定ができません。単純な弦振動式の力センサはこのために性能を高くすることが難しくなります。
また、複数本の弦を使用し複雑な構造の弦振動式力センサ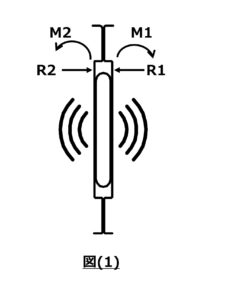 は音叉式以前に欧州に存在し現在も使われていますが、分解能は高くとれるのですが性能はそれほど高くありません。
は音叉式以前に欧州に存在し現在も使われていますが、分解能は高くとれるのですが性能はそれほど高くありません。
図(1)のように2枚の板を音叉型にすると、2枚の音片が対称に振動するため振動によって生じる反力及び曲げモーメントがそれぞれ打ち消しあい、支持部には振動による影響が最少となります。その結果振動エネルギーは振動子内部に閉じ込められ、メカニカルQの高い振動子が実現できます。Q値は真空中で10,000前後、大気中で5,000程度になります。
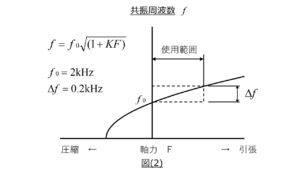 軸力と振動数(周波数)の関係は(4)式と図(2)で解るように直線ではなく2次の曲線になりますので、使用する場合は近似式で計算して直線化します。直線化しない素の特性は1%程度あるのですが、最小二乗法の4次式の計算でも1/100万程度の直線化が可能です。それだけある意味素直に力と周波数の関係が成り立っていると言えます。また、実用的には軸力に対する周波数変化は約10%程度で使用します。10%にこだわる必要はありませんが応力、クリープ、ヒステリシス、直線性、再現性、分解能等、要求する性能と実現性を考えて設計します。固有振動数(周波数)も形状に合わせて設計することが可能です。
軸力と振動数(周波数)の関係は(4)式と図(2)で解るように直線ではなく2次の曲線になりますので、使用する場合は近似式で計算して直線化します。直線化しない素の特性は1%程度あるのですが、最小二乗法の4次式の計算でも1/100万程度の直線化が可能です。それだけある意味素直に力と周波数の関係が成り立っていると言えます。また、実用的には軸力に対する周波数変化は約10%程度で使用します。10%にこだわる必要はありませんが応力、クリープ、ヒステリシス、直線性、再現性、分解能等、要求する性能と実現性を考えて設計します。固有振動数(周波数)も形状に合わせて設計することが可能です。
仕様、性能
音叉振動子(てこ式を含む)の諸元を下記します。
・測定範囲:2N~20N(200N)(200gf~2000gf(20kgf))
・振動数(周波数):1kHz~10kHz
・振動数(周波数)変化率:≒10%/F.S
・振動子部寸法:L=10mm~30mm、t=0.1~0.3mm、w=1.5mm~7mm
・メカニカルQ:4000~5000(大気中)
・再現性:±0.0001%(1/1,000,000)
・分解能:±0.00003%(1/3,000,000)
・温度特性(ゼロ点):±0.004%/℃(補償無):±0.0002%/℃以下(電気的補償有)
・温度特性(感度):±0.001%/℃(補償無):±0.0002%/℃以下(電気的補償有)
・空気密度の影響:≒-0.001%/mb
音叉振動式は高精度の力センサですが、図(1)の形状のままでは性能を発揮することが出来ません。実際に軸力を加える場合にそのままでは正確な力伝達が出来ないことと、音叉振動子を力伝達機構へ理想的に取り付けられず性能劣化や不具合が発生するためです。
てこ付音叉振動式力センサ
この問題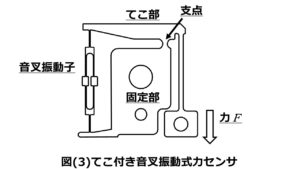 を図(3)のようにてこ付きの一体型構造にすることで、上記の性能や測定範囲の拡大を実現することが出来ます。
を図(3)のようにてこ付きの一体型構造にすることで、上記の性能や測定範囲の拡大を実現することが出来ます。
てこ付き音叉振動式力センサの特徴は、
(1)音叉振動子に正確に力を伝達することが出来る。
(2)音叉振動子がほぼ同一の仕様のままテコ比によって測定範囲の拡大が出来る。
例えば、音叉振動子が2Nの仕様とすると、てこ比を1:5にすることで2Nx5=10Nの測定が可能になる。
(3)固定部への取り付けによる音叉振動子への影響を無くすことが出来る。
その他、取扱い、実装のメリット等々があります。デメリットとしては材料費や加工工数の増加によるコストアップになりますが、性能と実用性を考えると許容範囲とも言えます。
音叉振動子やてこ付音叉振動式力センサなど名称が出てきましたが、以降はてこ付音叉振動式力センサを「音叉振動式力センサ」と呼び、リンク機構を一体加工したセンサを「一体型音叉振動式力センサ」と呼びます。
音叉振動子の駆動方式
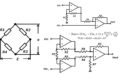
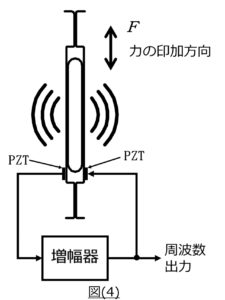 音叉振動子を固有振動数で振動させるためには図(4)のような発振回路を構成します。振動子の駆動やピックアップ方法・素子はコイル、PZT等いくつか考えられますが、PZTで説明を進めます。(PZTと言うより圧電素子とか圧電セラミックスの方が一般的かも知れません)
音叉振動子を固有振動数で振動させるためには図(4)のような発振回路を構成します。振動子の駆動やピックアップ方法・素子はコイル、PZT等いくつか考えられますが、PZTで説明を進めます。(PZTと言うより圧電素子とか圧電セラミックスの方が一般的かも知れません)
発振は自励振発振で振動子の駆動はサイン波で行います。そのままの周波数出力を波形整形(矩形波)してカウンター(CPU)でカウントしますが、周波数のカウントでは分解能が低いので、別途数MHz以上の基準クロックを用意し音叉の信号をゲートに使い基準クロックをカウントします。カウント値から周波数を求め直線化の演算を行い”力=F“を求めます。基準クロックをカウントしているため分解能を上げることが出来ます。単純に基準クロックを上げれば分解能は上がりますが、積算や平均化処理によって安定度が向上しますので、サンプリング時間内の分解能が確保できれば、必要以上に基準クロックを上げる必要はありません。
例)音叉の周波数f0を2kHz、基準クロックを10MHz、周波数変化率10%とすると、
・10MHz/2kHz x 0.1(10%)=500カウント/0.5msec
・1秒間に換算すると、500カウント/0.5msec=1,000,000カウント/sec
となり、1秒間で1/100万の分解能が得られます。
ところで「音叉(式)時計」と言うのをご存じでしょうか。U字型の音叉を基準クロックの振動子として使用した電子時計です。現在の水晶式(クォーツ)時計が開発される前、1960年代に米国の時計メーカから発売され、腕時計や掛時計に使われていました。1970年代のクォーツ時計の登場で無くなってしまいましたが、Webなどの記事を見ると今もコアなファンがいたり、オリジナルメーカから復刻版も発売されているようです。
 時計に使われていた音叉振動子の駆動やピックアップは小さなコイルと磁石が使用され、回路もトランジスタ1,2石の構成ですが大変正確な時を刻んでいました。写真は実際の腕時計に組み込まれていた音叉振動子です。小型で振動数360Hzの振動子です。実はこの時計用音叉に関わるU字型音叉の基礎技術は、音叉振動式力センサの開発にとって大変参考になった技術でした。音叉振動式力センサの開発は1980年代に始まりましたが、お蔵入りしていた音叉振動子の技術資料を集めて開発メンバーは音叉振動子の基本を学びました。U字型音叉振動子の基本はいまだ変わらず大変参考になります。
時計に使われていた音叉振動子の駆動やピックアップは小さなコイルと磁石が使用され、回路もトランジスタ1,2石の構成ですが大変正確な時を刻んでいました。写真は実際の腕時計に組み込まれていた音叉振動子です。小型で振動数360Hzの振動子です。実はこの時計用音叉に関わるU字型音叉の基礎技術は、音叉振動式力センサの開発にとって大変参考になった技術でした。音叉振動式力センサの開発は1980年代に始まりましたが、お蔵入りしていた音叉振動子の技術資料を集めて開発メンバーは音叉振動子の基本を学びました。U字型音叉振動子の基本はいまだ変わらず大変参考になります。
今回は基本的な概要を解説しました。音叉振動式力センサは日本で生まれ40年以上たちましたが、応用が限られ残念ながら汎用のセンサとして活用されていません。いかに優れたセンサでも向き不向きのアプリケーションがあり、開発・設計の段階や活用するうえで解決すべき課題も多数あります。冒頭にも書きましたが、筆者は音叉振動式力センサが誰でも何処でも使用できるセンサになることを望んでいます。力計測だけでなく他の物理量の計測も可能になることを目指して、微力ながら尽力して行きたいと考えています。次回以降、センサ部、機構部、電気部等の詳細を解説して行きたいと思います。
ご意見、ご要望、ご質問、ご感想をお待ちしております。
技術的なアドバイス、コンサルティング及び技術開発、製品開発のお手伝いを行います。
ご希望、ご要望があれば「お問い合わせ」からご連絡ください。
参考文献:
OIML R60:Metrological regulation for load cells
OIML R76-1:Non-automatic weighing instruments
Part 1: Metrological and technical requirements – Tests
JIS B 0192:はかり用語
JIS Z 8103:計測用語
「はかりハンドブック 第2版」:日刊工業新聞社
新光電子株式会社:http://www.vibra.co.jp
「電子回路素子としての電気・機械振動子とその応用」:永井 、 近野 コロナ社
「機械振動子を利用した高精度センサ」:計測と制御VOL.24,№8:原田、他
「音叉式電子天びん」:計量管理vol37,№6-7:西口
「Precision Balances Apply Tuning Fork Vibrators」:ICAM93:小林
「ディジタルフィルタによる音叉センサの応答性と精度向上に関する研究」:岡本:東京理科大学
「PERFORMANCE OF “TUNING FORK” LOAD CELLS」:OIML BULLETIN vol.LVI №1 SHINKO DENSHI